Выставляю на обозрение две проектные работы по робототехнике. Рекомендую ознакомиться с хронологическим ходом разработки.
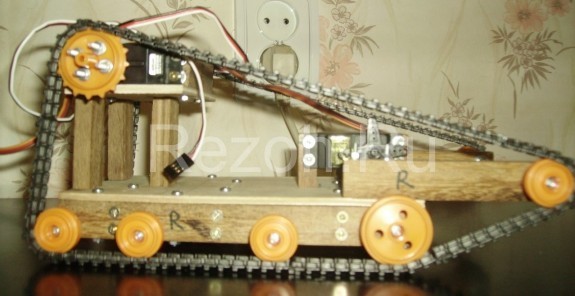
Движители и крепления колёс находятся на «первом уровне», а именно на пластиковом основании.

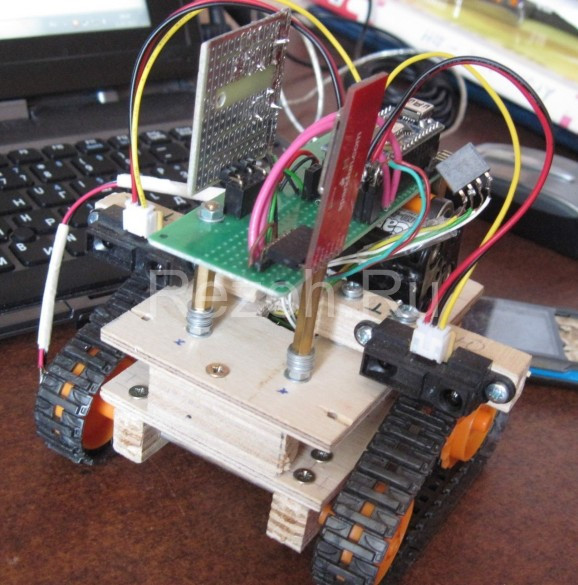
В качестве движителей использованы серводвигатели постоянного вращения с возможностью изменения скорости вращения.
На втором уровне размещена вычислительная и коммуникационная техника: микроконтроллер, к которому подключены все движители, модуль BlueTooth.
Вторая версия платформы: увеличена устойчивость всей конструкции за счет увеличения площади, на которой распределена масса робота.

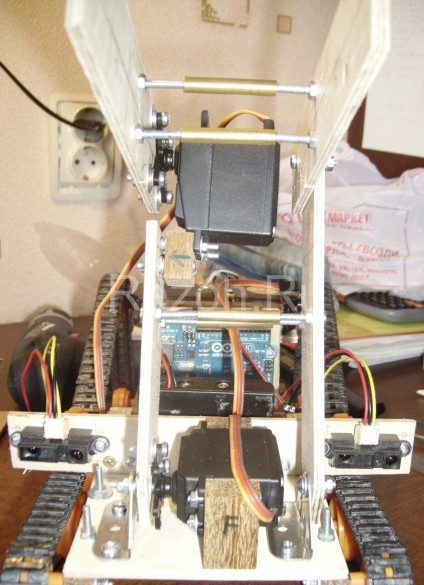
Двигатель, обеспечивающий наклон первого плеча манипулятора относительно платформы.

Площадка для закрепления микроконтроллера.
Площадка для закрепления манипулятора и дальномеров.

Серводвигатель, отвечающий за наклон первого плеча манипулятора относительно платформы.

Конструкция манипулятора в сборе.

Механизм захвата манипулятора.

Отладка относительного перемещения суставов манипулятора.

Робот в полном составе подключен к отладочному комплексу.

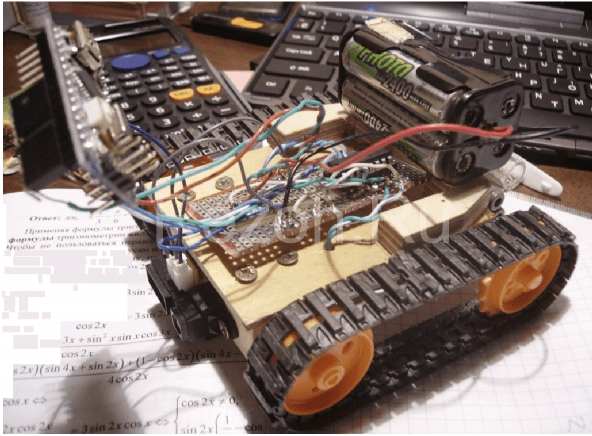
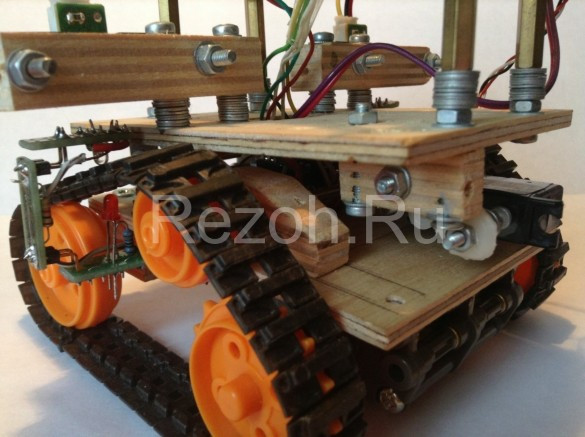
Вариант робота в компактном исполнении.
Вычислительный блок робота.
Блок связи.
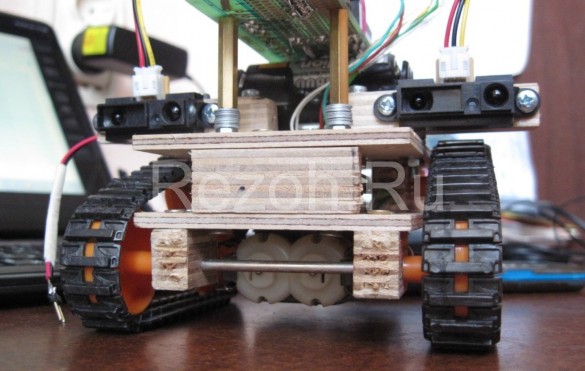
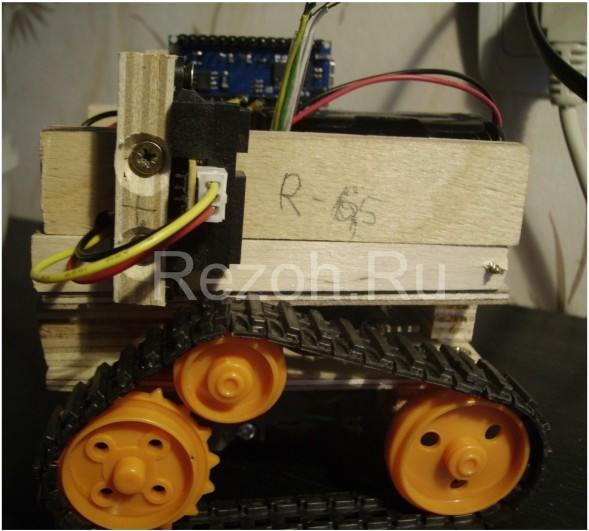
Сдвоенные электромоторы с редукторами.
Дальномеры.

Правый гусеничный энкодер.
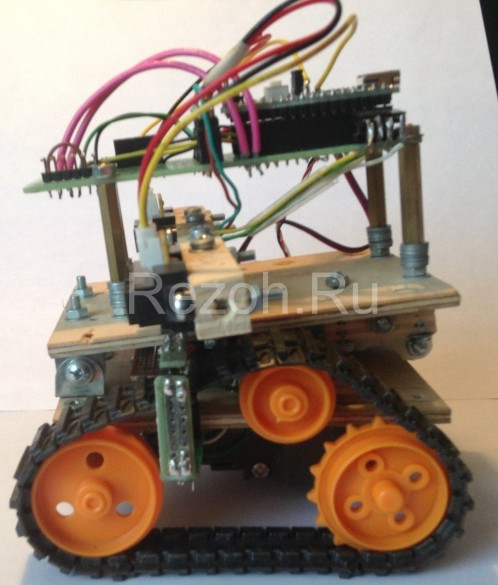
Ось наклона рабочей части платформы.
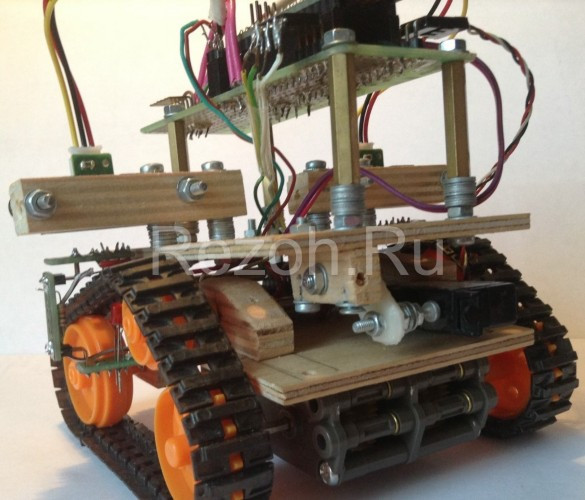
Наклонный механизм платформы.
Левый энкодер.