Добрый день, дорогие читатели,ученики и просто проходившие мимо :). Я собираюсь в течение нескольких уроков/статей рассказать вам об основах работы с МК Arduino , о её возможностях; приведу вам много примеров своего кода и т.д.

Ну, во-первых, вам потребуется купить « Arduino» или её аналог, для работы с ней :), а во-вторых – установить специальную среду разработки с сайта производителя.
В принципе это всё, что нужно по-минимуму, хотя я ещё покупал монтажную плату и «туеву хучу» всяких микросхем, диодов, резисторов.… Советую купить ещё и монтажную плату. Всё! Переходим к основной части!
Ардуино — это достаточно мощный и многофункциональный микроконтроллер, лично я считаю, что самое удобное в нём то, что (1) – он сразу готов к любой работе: пишите код, даже программатора не нужно (кто не понял – не задумывайтесь), (2) – это простой язык программирования (ЯП.): облегчённый «С».

Я вроде бы уже говорил, что построить на Ардуино можно практически всё, что угодно: будь то какой-то хитрый девайс для дома, ваш личный робот или управляемое откуда угодно «Нечто» :).
Для начала надо определиться, что мы хотим: пусть каждый определит это для себя, а здесь посмотрит/почитает полезную информацию в статьях. В любом случае будет очень неплохо, если вы попытаетесь изобразить схему желаемого на бумаге для наглядности: это беспроигрышный вариант (я лично пишу на бумаге ещё и весь код, очень помогает всё и сразу обдумать).
Схема есть! Но даже если и нет, то сейчас это неважно. Сейчас мы будем учиться писать «первый» код: соблюдать синтаксис, объявлять переменные, назначать ножки ввода/вывода, настраивать их и многое- многое другое. В общем виде любая программа состоит из трёх «блоков»: блок назначения, блок настройки и основной бок: блок непосредственного выполнения.
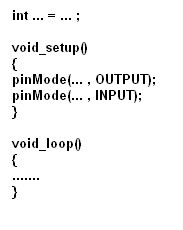
На схеме наглядно показан «мини-шаблон» для любой программы. Любая программа начинается с:
- назначения «ножек» и переменных, затем
- настройка ввода и вывода в функции «void setup()»
- написание программы в кавычках » { } » в функиции «void loop()»
Грубо говоря, это и есть наша программа. Наша элементарнейшая программа. а точнее — разъяснение перед ней… Теперь рассмотрим настоящий код. Но, вам придётся собрать простенькую схему — к ножке МК подсоединить светодиод, светодиод соединить с резистором, а резистрор заземлить (подсоединить на минус).
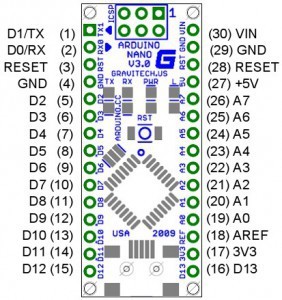 (на приведённой картинке плата Nano. Внимание, для каждой платы своя распиновка! Гуглите её внимательней!)
(на приведённой картинке плата Nano. Внимание, для каждой платы своя распиновка! Гуглите её внимательней!)
// led - наша переменная, подключённая на ножку №3
int led = 3;
void setup()
{
// так настраивается ножка, названная переменной, на вывод
pinMode(led, OUTPUT);
}
void loop()
{
// на ножку подаётся "высокое" напряжение, то есть импульс
digitalWrite (led, HIGH);
//задержка в 500 милисекунд (1000 = 1 секунда)
delay (500);
// "выключение" ножки, выключающий импульс
digitalWrite (led, LOW);
}
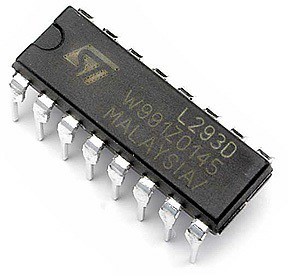
Однако хочу вас всех сразу предупредить, что импульс — это импульс. Да, он может тускло включить светодиод, но двигатель — никогда! По-этому, необходимо сделать «драйвер-двигателя» — очень полезная и универсальная вещь. Это — микро девайс, построенный на основе микросхемы L293D — по сути это только микросхема Читать статью про драйвер двигателей — тут!
А теперь рассмотрим маленькие, но важные нюансы, на которых может попасться каждый.
В программу, для работы со специфическим оборудованием (например: LCD-дисплей, Internet- Shield, Wi-Fi— или Bluetooth— модуль связи, сервомашинки) необходимо приписывать
«библиотеку» (файл — .h) в начало кода. Допустим, для работы с сервомашинкой это будет: Не надо пугаться, для любого оборудования очень легко можно нагуглить библиотеку. Вообще в среду разработки уже включены несколько библиотек, однако их надо вставлять из специального меню: Sketch > Import Library… > нужная библиотека.
В конце КАЖДОЙ строчки ставится знак » ; » — это синтаксис и на этом можно погореть. Однако «точка с запятой» не ставится после строк «void …» и после скобки завершения кода «}».
Назначение ножек МК — тоже задача не из лёгких: тут
надо быть внимательным вдвойне. Ведь есть два типа непосредственно работающих ножек: это Digital-ножки (на любой плате обозначены D и цифрой — персональным номером каждой ножки) и Analog-ножки (всё тоже самое, только буква — А). Вообще, эти ножки — одинаковые по своим функциям, но только Digital — более «грубые» они могут подавать или считывать импульс лишь в
«формате» HIGH (1) или LOW(0), в то время, как Analog-ножки считывают и задают абсолютно точный импульс ( Возможно, сейчас вам будет трудно это осознать, но со времнем мудрость дойдёт и до вас). Из это следует логичный вывод — использовать Digital-ножки для управления базовой, ходовой частью: например, включать/выключать двигатели, светодиоды и прочее, а Analog-ножки для коррекции всего этого, для работы с датчиками или сенсорами.
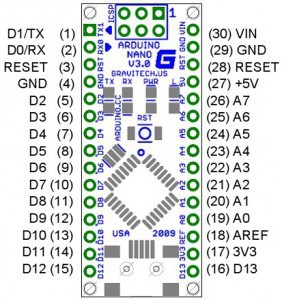
А теперь — самое главное что вам предстоит узнать про эти ножки: для работы с ножками, во время их назначения надо записывать тот номер который написан на плате, рядом с ножкой (это ОЧЕНЬ важно. Я, не зная этого, разбирался в чём дело почти месяц!). Это необходимо для обоих типов ножек!
И ещё маленький секрет: Analog — ножки можно не назначать, а прямо сразу вызывать из программы. Это удобно, если необходимо пару раз снять какие-то небольшие показания; хотя, каждый сам для себя решит степень удобности.
Итак, что-то вы, я надеюсь, уже усвоили, поэтому я представляю вам мой дальнейший план статей/ уроков. Я объясню вам, как работать с переменными и почему переменные — наше всё; как управлять Ардуино напрямую и «извне»; расскажу про кнопки и датчики; какие, как, а
главное — зачем можно сделать механизмы; как сделать себе игрушку или помощника… Да, пока не густо, но это только начало, так как я буду отвечать на ваши вопросы, а на самые интересные пожелания тоже постараюсь сделать понятные статьи. На сегодня это всё, но, чтобы вы не скучали, я выложил несколько фотографий своих развивающихся «творений», привёл вам примеры моего собственного кода, дал шаблоны для подвижных платформ — ваших будущих роботов.
Заходите на сайт Kiloom.ru — за новой пищей для мозгов!